Monterey Bay Aquarium Research Institute ( MBARI )
Annual Open House July 21, 2012
a techie view
noon to 5 p.m. in Moss Landing.
by Ed Thelen
|
This was my first visit, hope it won't be my last ;-))
I arrived so early that I got a good parking place ;-)) The dock area was not roped off yet, so I started there. | 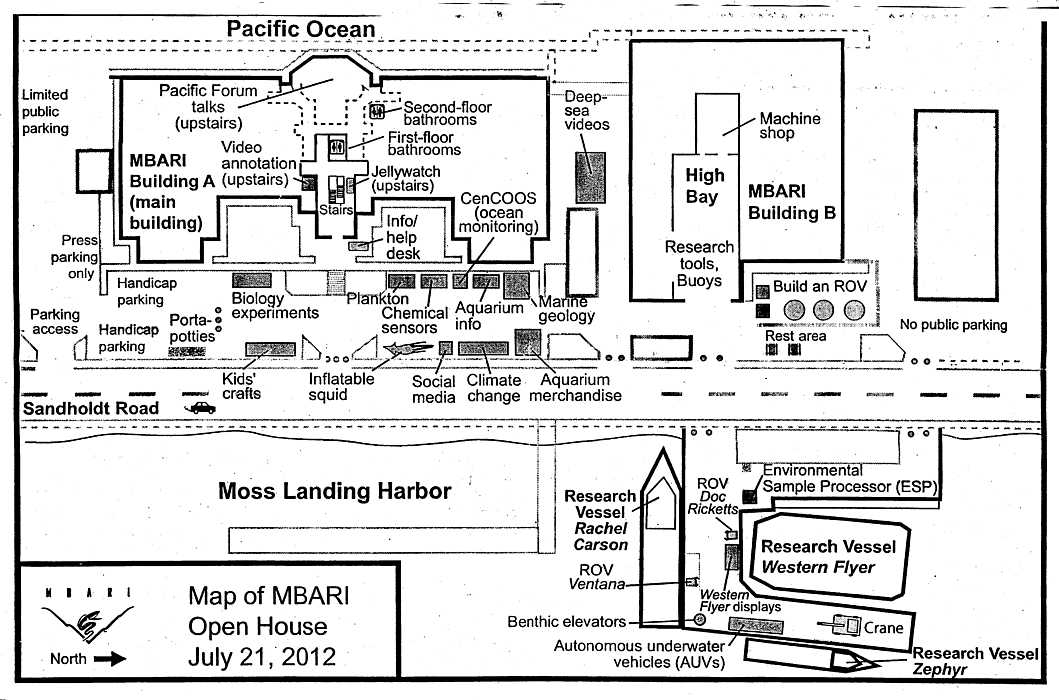 Map |  Presentations |
TABLE OF CONTENTS
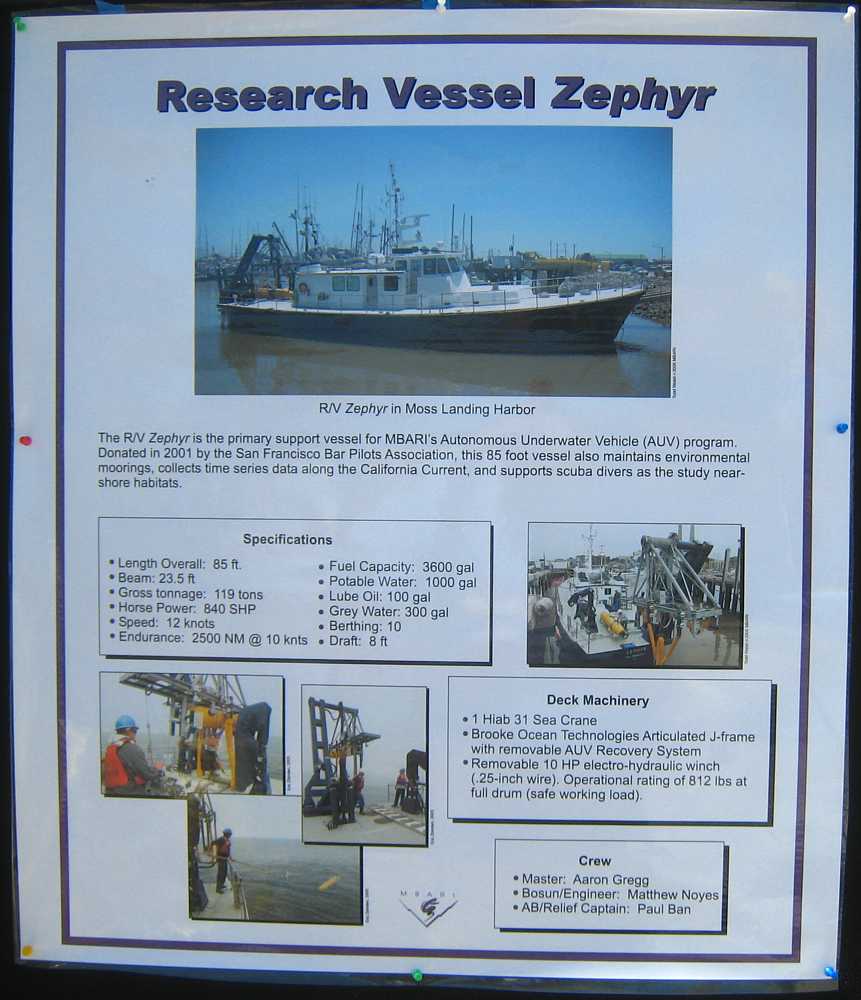
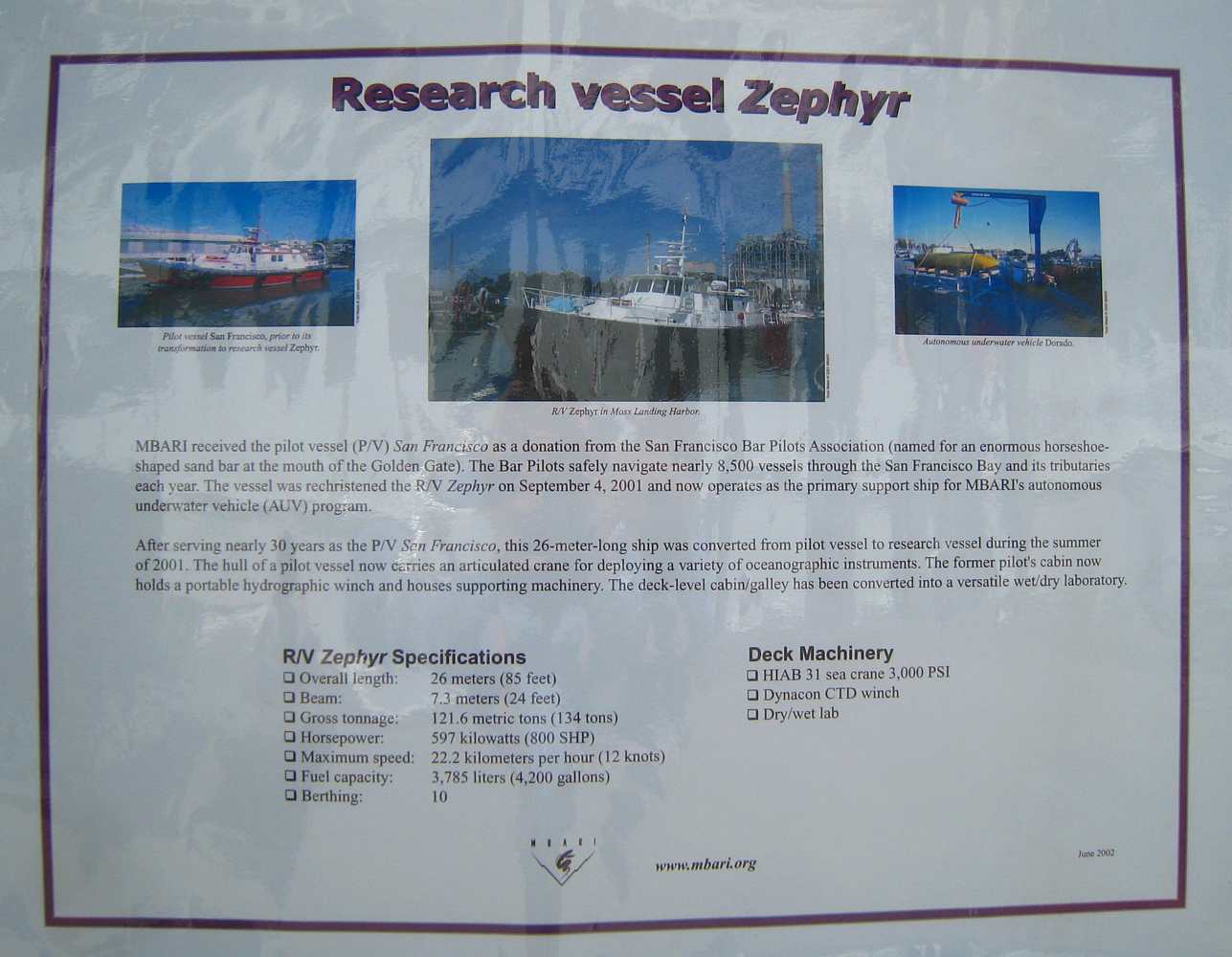
- The smallest ship, of three, the Zephyr
- Autonomous Underwater Vehicles, the AUVs
- Long Range Autonomous Underwater Vehicle, the Tethys
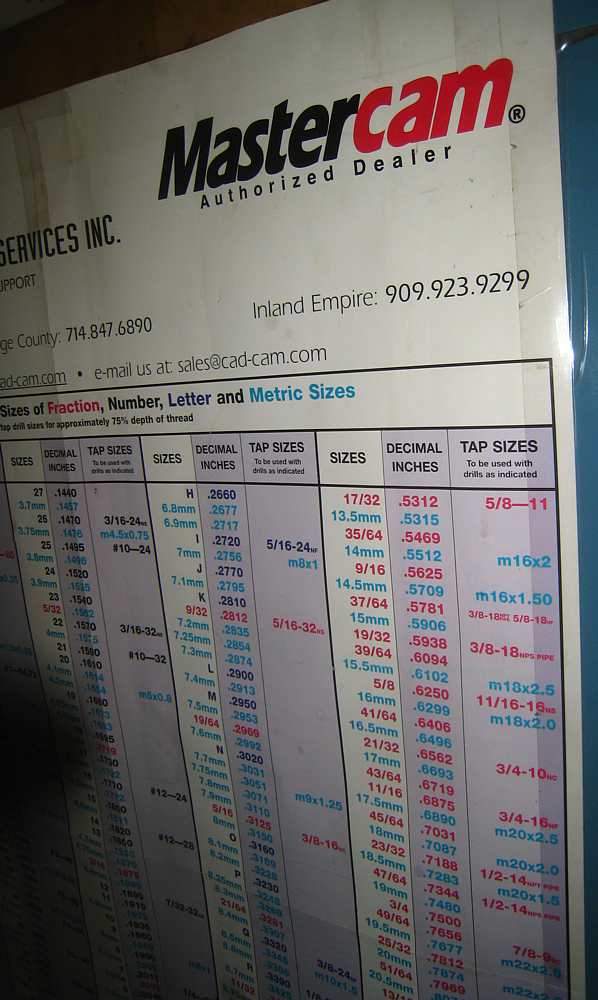
- Time for a break, in the Machine Shop ;-))
- ( I also saw the operation of the records of MBARI's researches. )
- - A young lady in that room said the
Davidson Seamount
is only 75 miles away.
- Back to the dock and the Remotely Operated Vehicles) ( ROVs )
So, lets show the "little" Zephyr, a breeze ;-))
The smallest ship, the Zephyr
Thanks to the 9/11 Muslim terrorists, the TSA bars the
general public from the three available ships. Two of the three ships
are so large that photographing their outsides was inconvenient.
A video of Zephyr in Gulf of Mexico
with AUVs (Underwater Automomous Vehicles ;-))
 |  |  |
The Autonomous Underwater Vehicles, the AUVs
|
Just the the southwest of the above ship was a tent with displays of
Autonomous Underwater Vehicles ( AUV s ). Fascinating little robots
that looked very similar to, but slightly smaller than, submarine torpedoes.
( Picture shot just before opening for the mob :-| ) | 
|
| Lithium batteries have more power density, and more cost, in AUV 1 | 
| and good old lead/acid for less demanding applications, in AUV 2 | 
|
| AUV 1 and AUV 2 driven by this thrust vectoring system. The speed requirements are much less than war torpedoes - the little round can to the left of the prop contains a little electric motor. Electronics is visible in the little oil filled can with the transparent top. The electronics run at ambient pressure. | 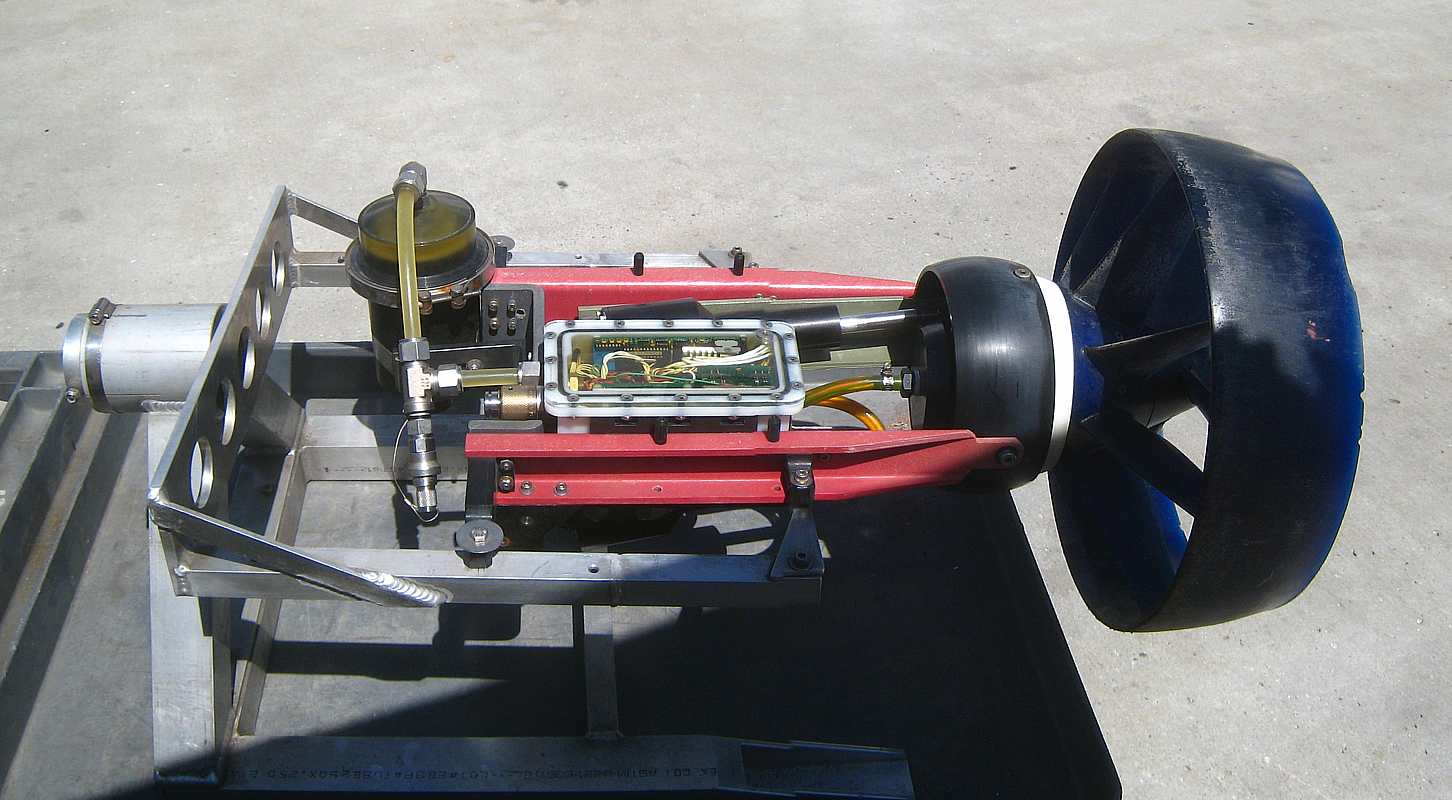 |
Navigation under water is always "interesting".
| This big can contains a laser ring gyro that at least gives heading information. Wikipedia says they can be accurate to 0.01 degrees/hour. I forgot to ask if accelerometer information was also available to estimate velocities and distances. |  |
I asked about roll stability - the answer was that the top of the torpedo is very buoyant, and that no other fins or control was necessary. Another factor could be that the laser ring gyro guidance was part of every record, and roll information could correct resulting roll errors, say in the sonar data.
The AUVs (and the ROVs - Remotely Operated Vehicles ) used by MBARI are all slightly positively buoyant - they float a little. To do this, they use a solid material consisting of an epoxy resin surrounding millions of little glass bubbles filled with air. This model of the little glass bubbles are strong enough individually to resist pressures past 1,000 meters depth of sea water. The epoxy and glass bubbles are cast into the required flotation shapes - and are not cheap !!
Electronics package -
| This glass topped sphere contains the electronics. It protects the electronics from pressure and sea water. Apparently glass is relatively light, transparent, and resistive to considerable underwater pressure. Probably the commands, navigational computing, and sonar controls, and path-time-data recording. The black stick to the right is an antenna. |  |
AUV 1 had no pay-load.
| It had holes drill in it's skin for sampling bottles. It apparently could cruse to locations and depths taking water samples as programmed. |  |
| This is a survey taken with the AUV "Dorado" in the Scientific Response to the Deepwater Horizon Oil Spill. | 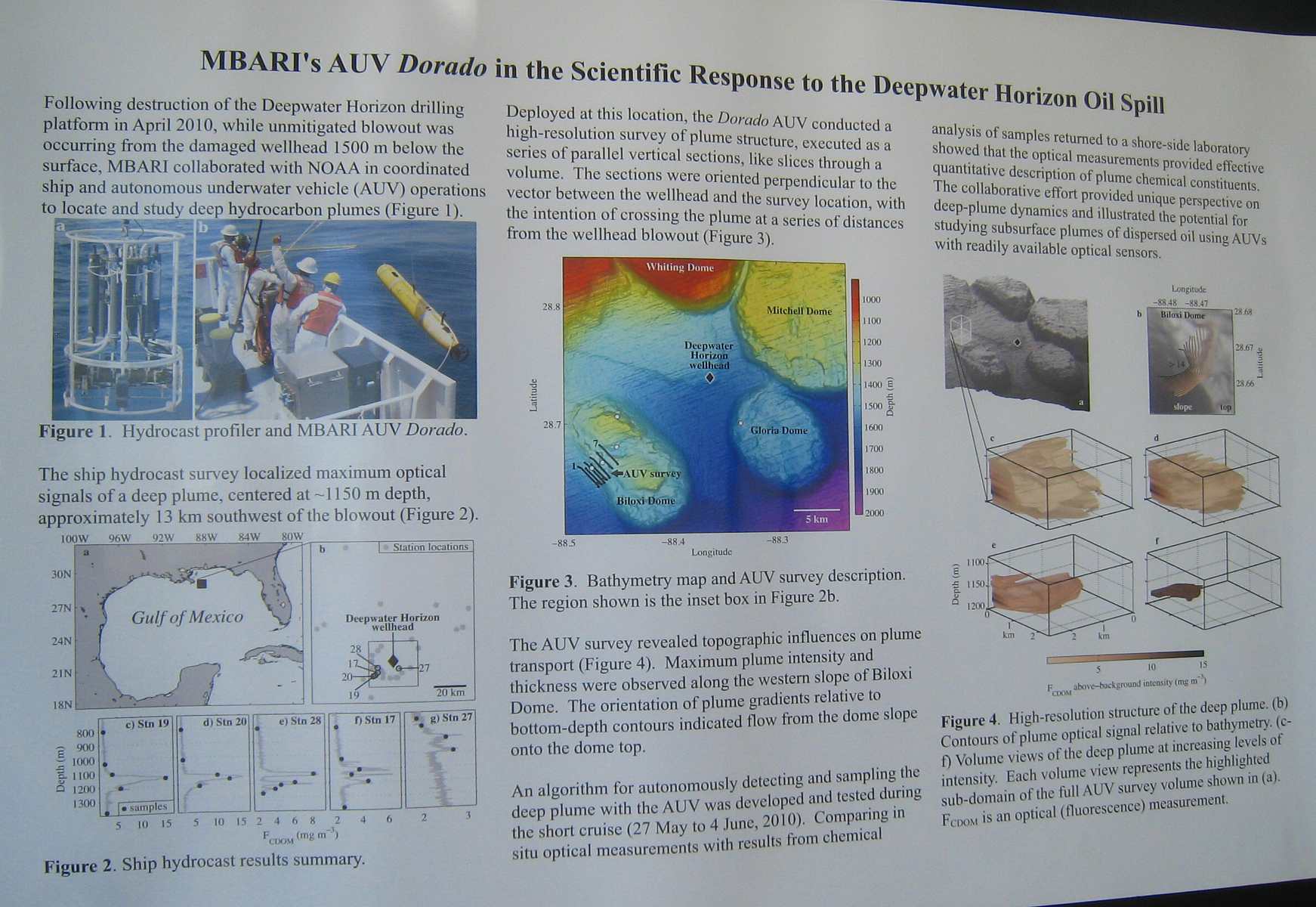 200 KBytes | Examples of Oceanographic Research with the "Dorado" AUV. | 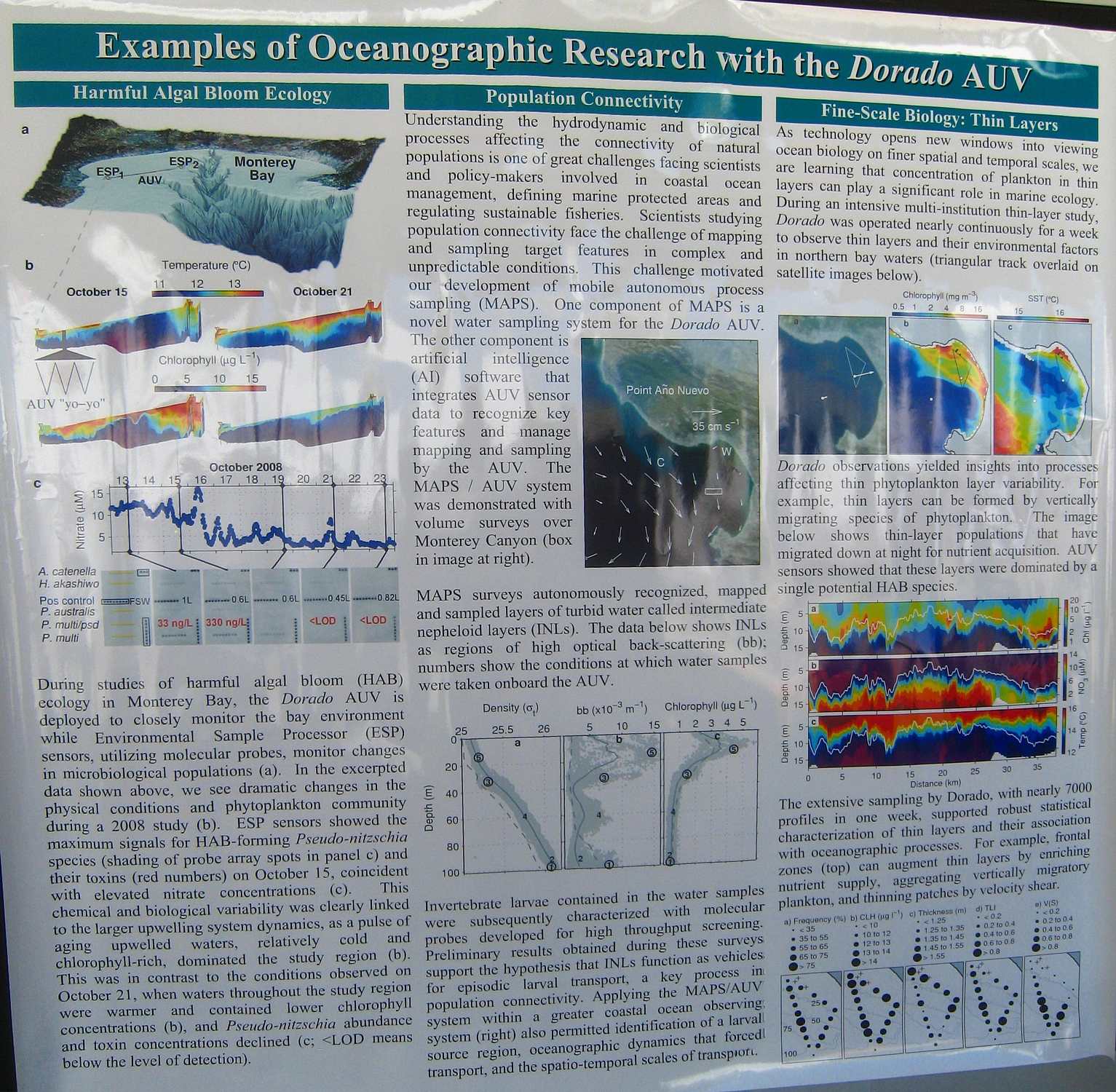 340 KBytes |
AUV 2 had a pay-load.
| This is a sonar which can map the sides of underwater canyons and icebergs.
Frequency is always a compromise
- Higher frequency gives better resolution, but is attenuated more. - Lower frequency ... The frequency here is on the order of 100 KHz. For reference, frequencies used in human medicine is about 1000 KHz. | 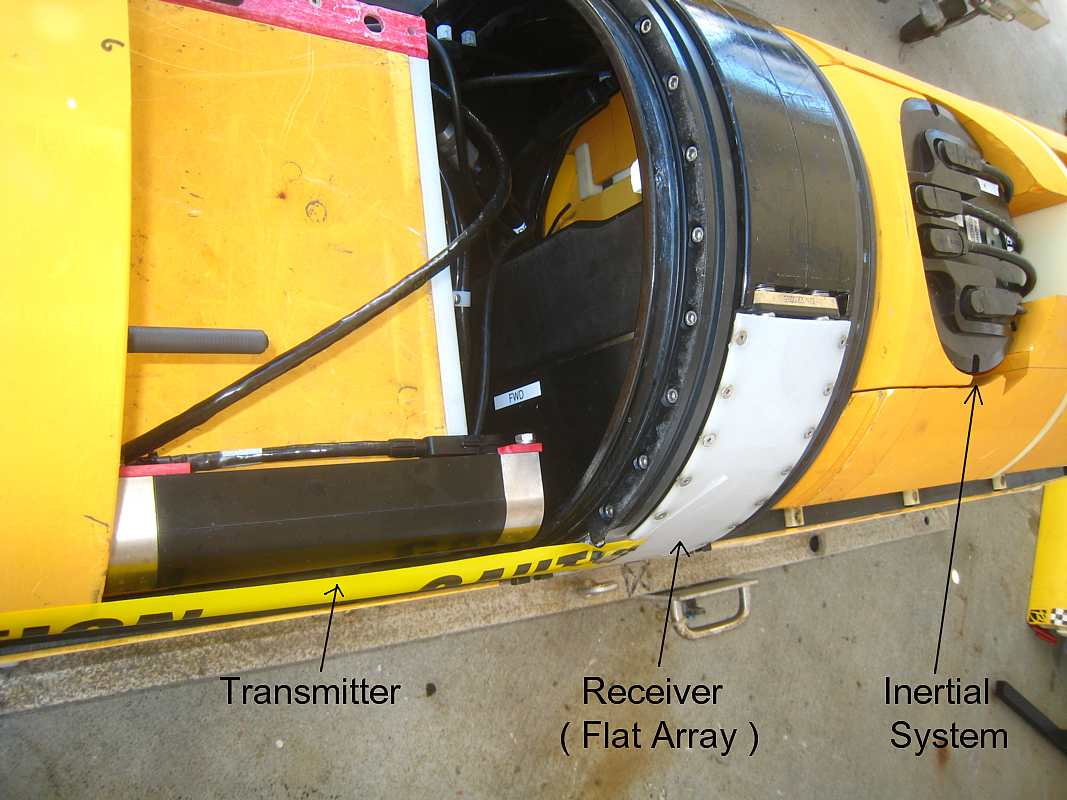 |
|
This is a sonar survey taken with a different kind of vehicle.
It talks a bit about navigational errors. | 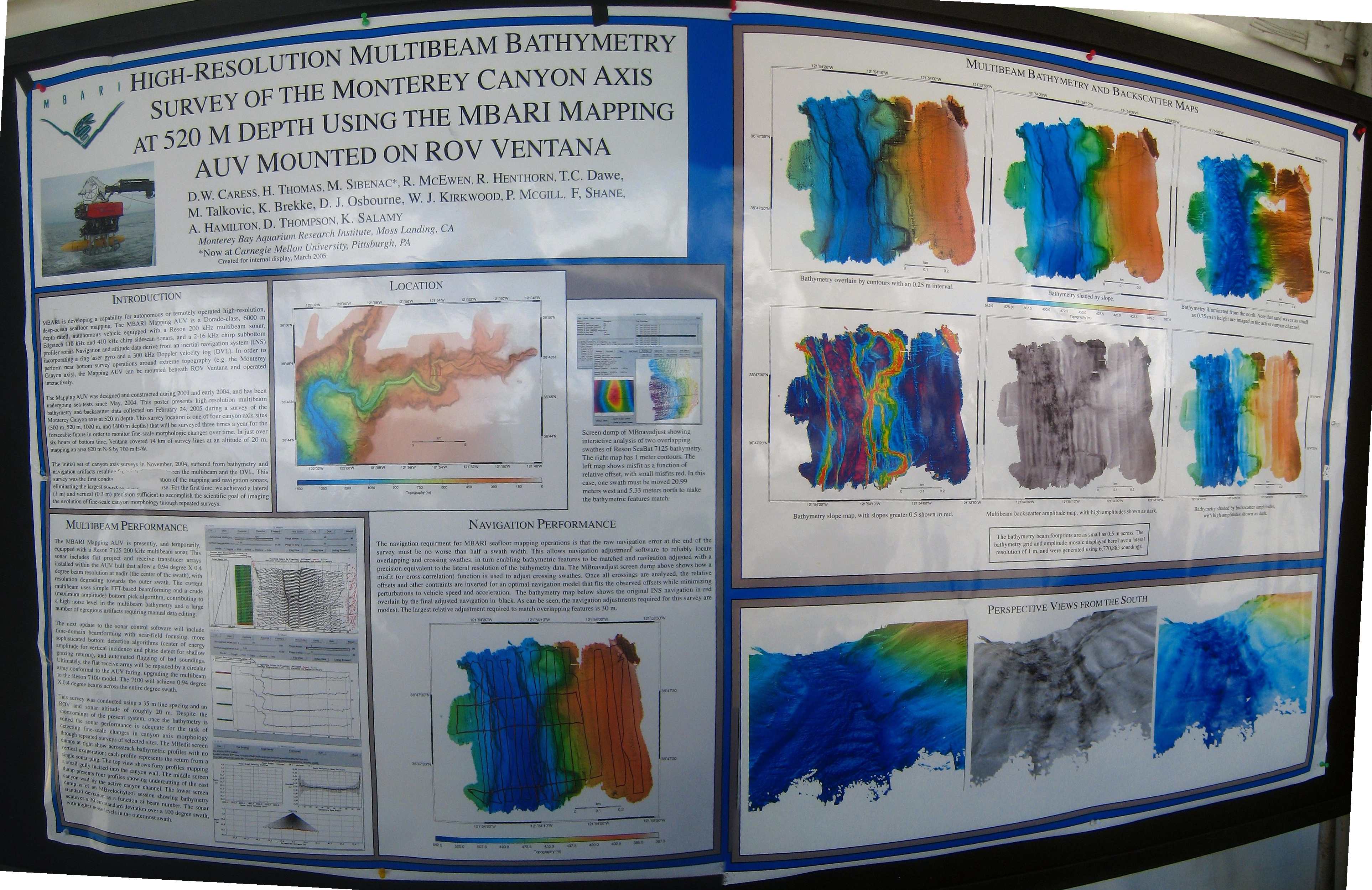 800 KBytes |
Long Range Autonomous Underwater Vehicle, the Tethys

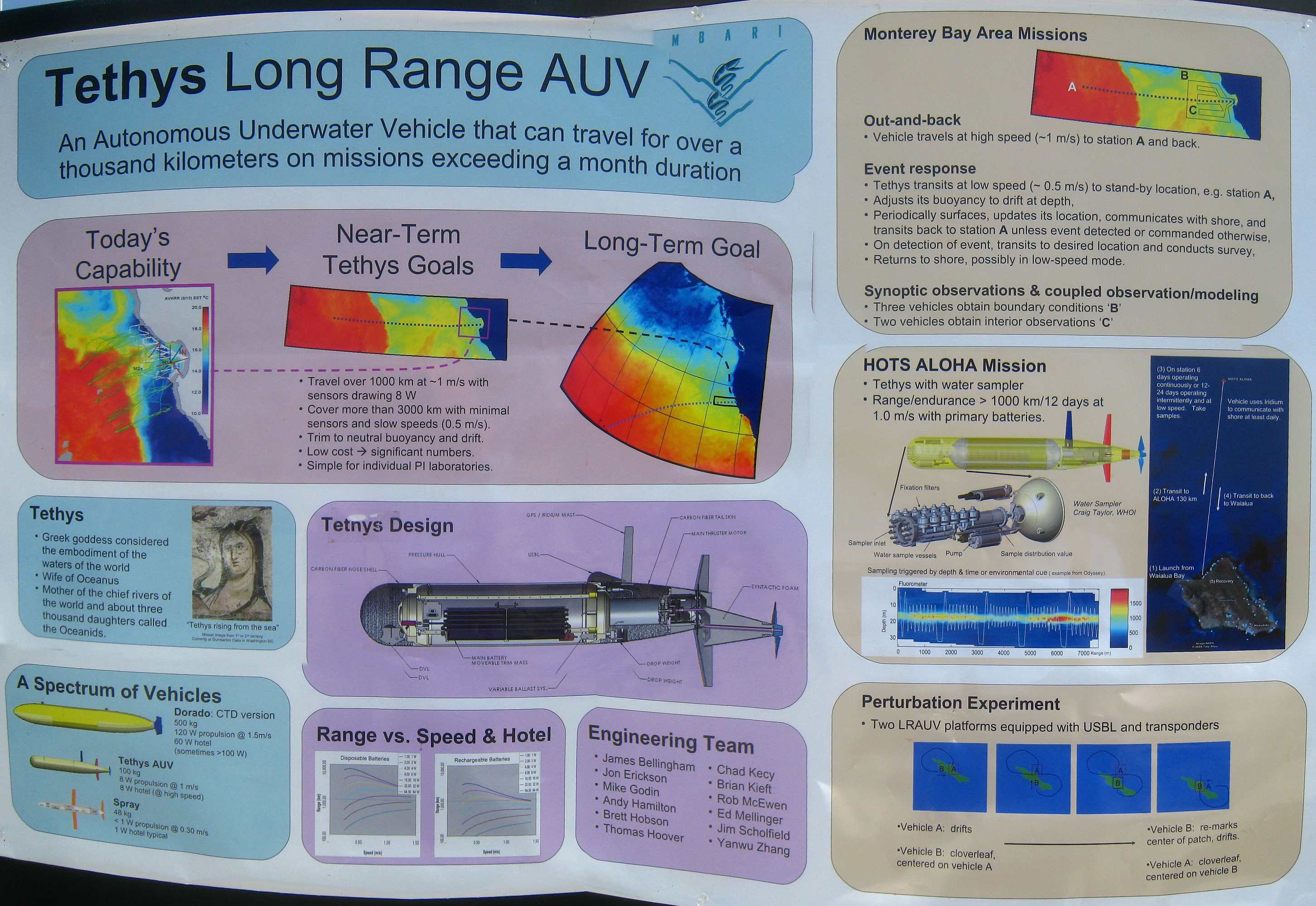
The presenter had an iPod or smart phone in his hand. He said "I can start the motor and turn the propeller." and did. OK - I figured he has an "app" in his hand held device with a link to the cute torpedo like AUV.
But NO - He explained that the pathway was from his hand-held, to his lap-top, linking via the
Internet to some center in Virginia, which links to an up-link to world covering satellites
( I think he said "Iridium" ),
down linking to the antenna on AUV now six feet from his hand held device.
And he has two way linkage - verify that the command was received and executed, and up-load data
from the AUV, from any part of the world with access to satellites :-) Which does not include
under the surface of the ocean ;-)) Dig That !!
The same antenna post of course has a GPS antenna so that the AUV can determine its exact location when the antenna is out of the water.
|
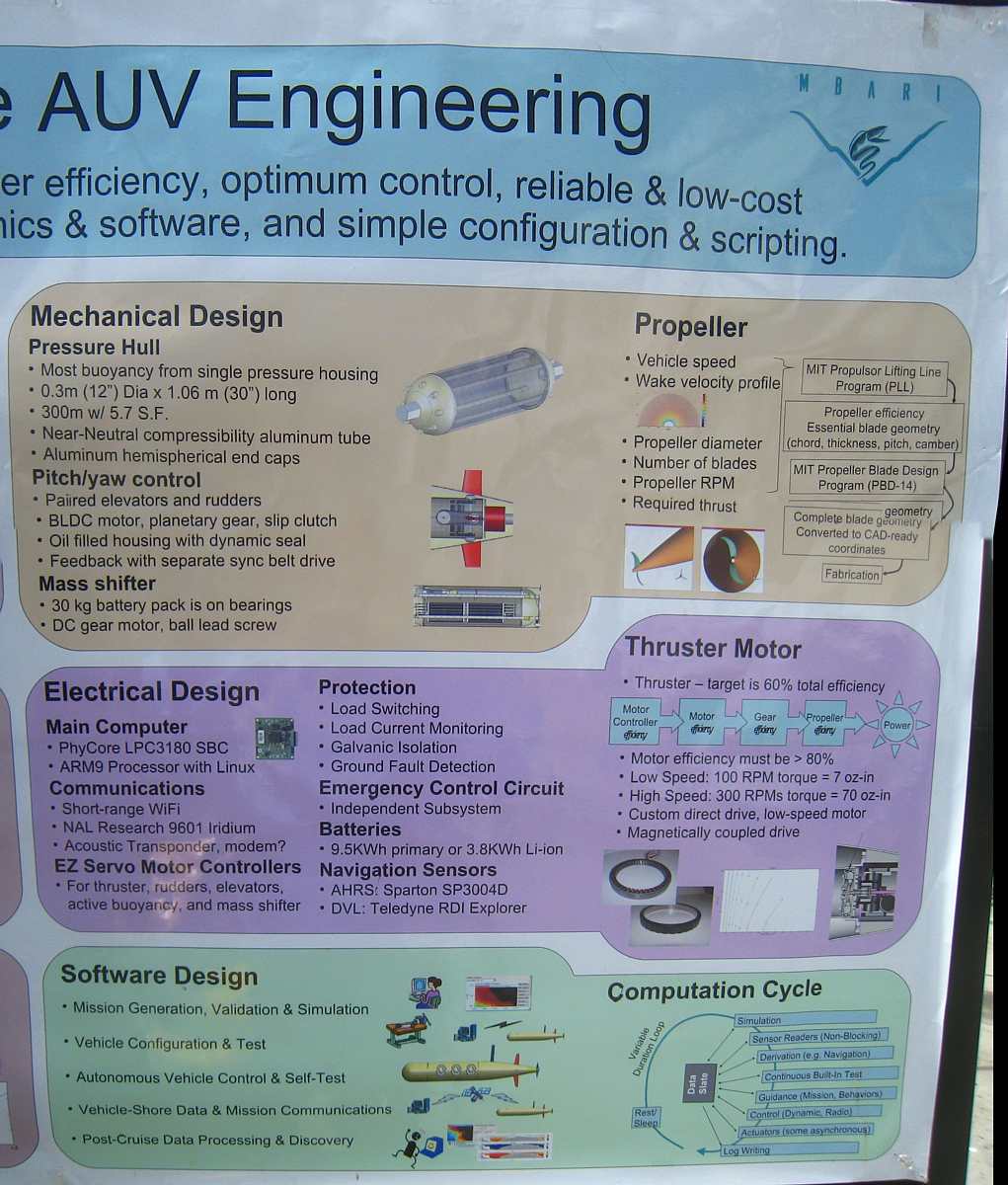
Tethys Long Range AUV Engineering
Focus on drag reduction, motor & propeller efficiency, optimum control, reliable & low-cost mechanical structure, fault-tolerant electronics & software,, and simple configuration and scripting. |
 left half |
 right half |
|

|

|

|
And just outside the machine shop,


Back to the dock and the Remotely Operated Vehicles
( ROVs )
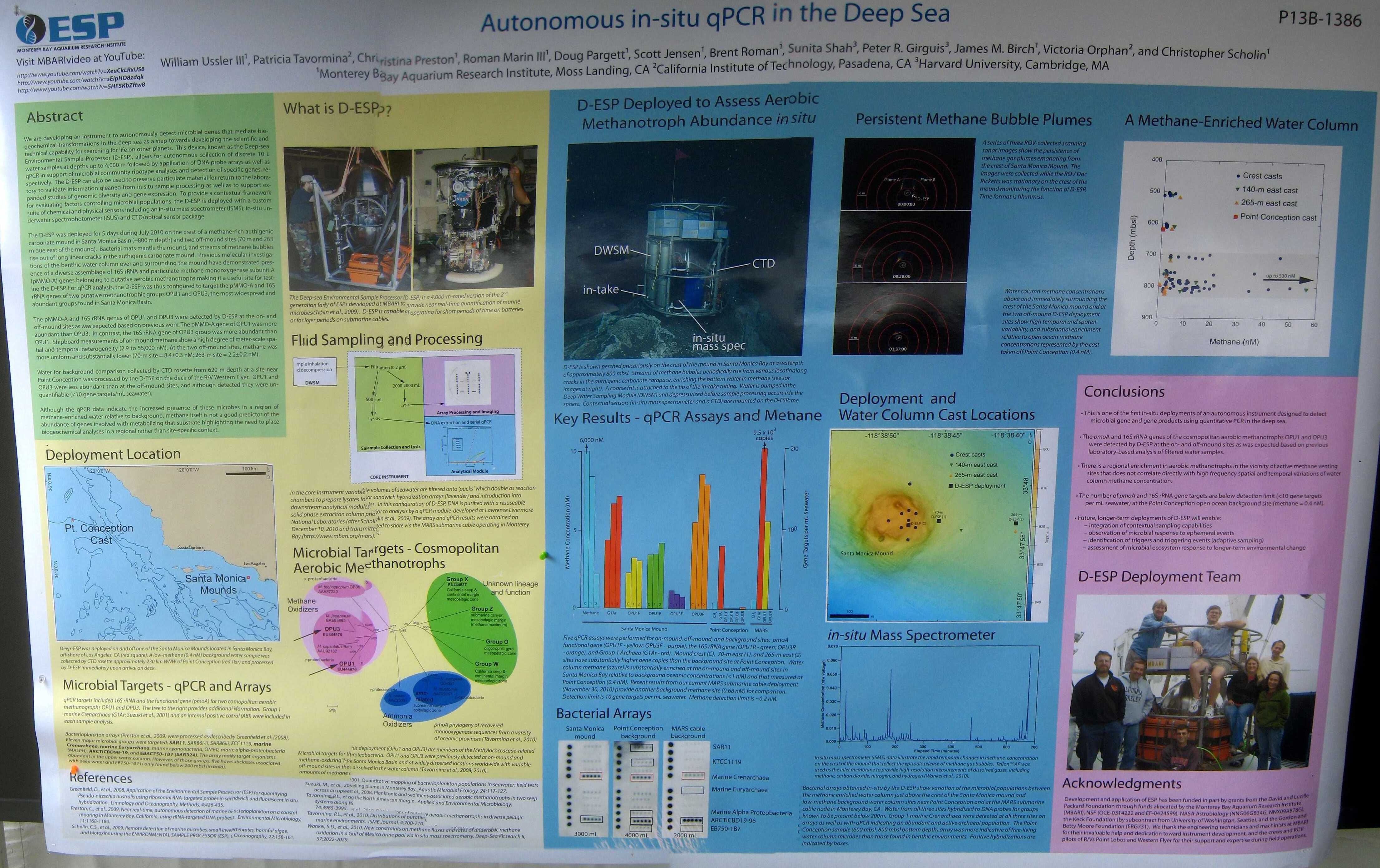
The first display on the dock was to me the most difficult. It was about
looking for specific DNA in sea water at requested locations and depths.
Something about looking for emerging blooms or "red tides" for early warning.
Since the specific DNA of interest is at very low concentrations, the magic of Polymerase chain reaction (PCR) is used - remotely, at depth, in real time. And apparently repeatedly until either chemicals or batteries are depleted.
This can be a great cost and time saver - searching for potential problems can be accomplished without an expensive vessel being on-station collecting, then rushing samples to a lab.
| DNA Analysis Instrument |

| Enclosed in this vehicle. Again a glass globe protecting the instruments. There is a kind of reverse pump inside to reduce the water pressure before analysis. |

|
| Tracking Microbial Changes in the Deep Ocean, Lessons Learned From the D-ESP |
500 KBytes | "Autonomous in-situ qPCR in the Deep Sea" - Heavy ;-)) |
1030 KBytes |
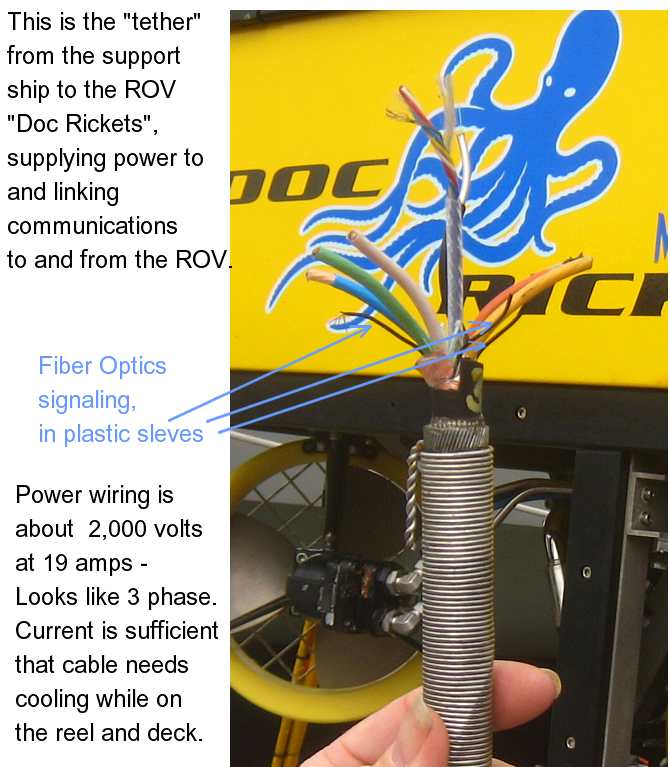
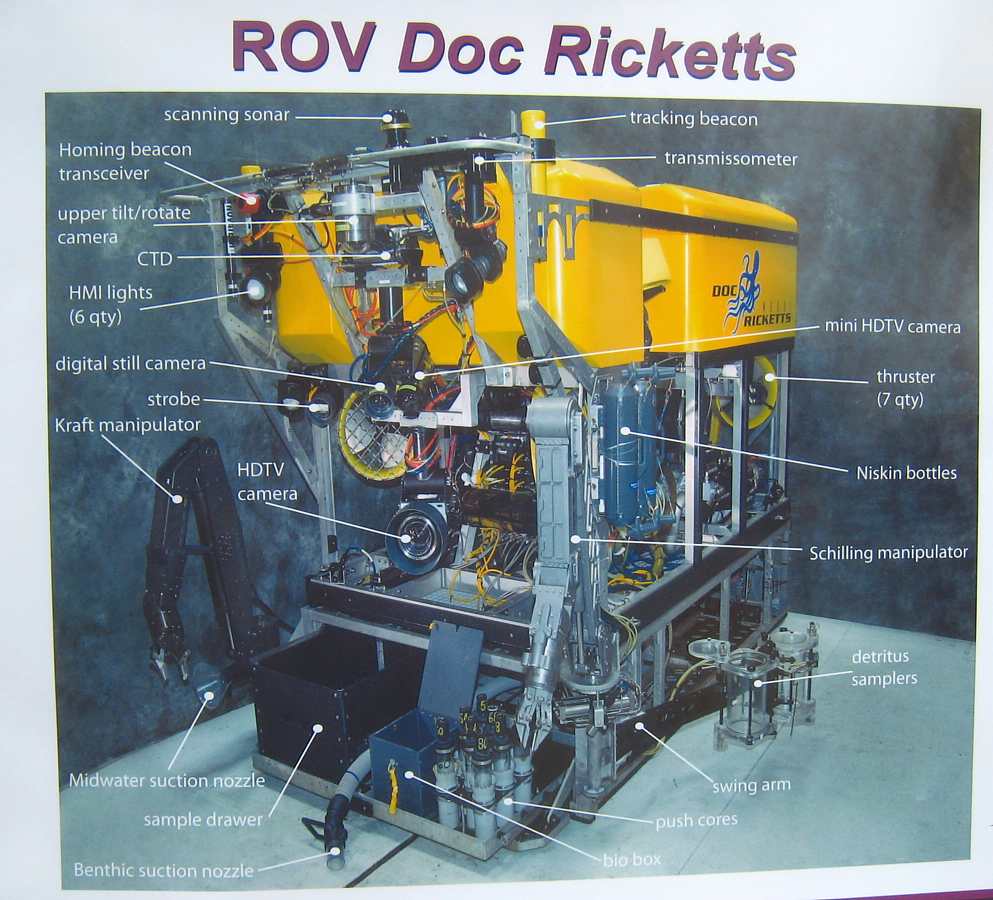
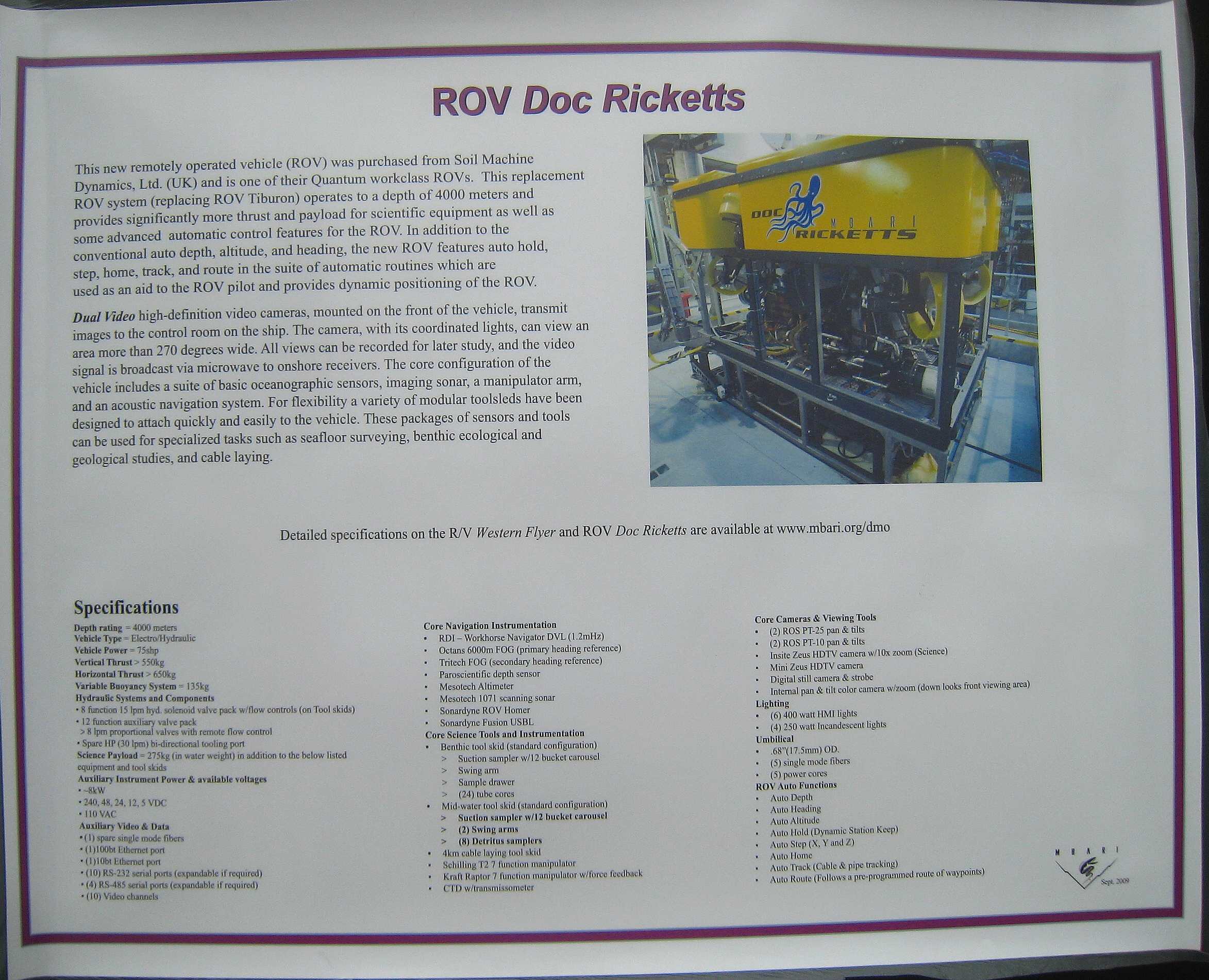
And the multiton Remote , the Doc Ricketts, a marine biologist of "Between Pacific Tides" and John Steinbeck fame.
Where to start? - This vehicle is powered and controlled through a 1 inch diameter
cable - called a tether - from a surface vessel with an or several operators.
It is made slightly buoyant for several practical reasons
- it can be retrieved in most problem situations :-))
- when near the bottom, it thrusts up gently, not stirring any bottom sediment :-))
- no weights are left at the bottom at the end of a dive
| the Doc Ricketts - RightSide
Presenter on right is one of its pilots. |

| the Doc Ricketts - LeftSide
Good view of robotic arm. |

|
| the tether, cable from ship
2,000 volts, 3 phase, & 3 fiber optics lines |
| Two of six hydraulic propulsion units
Two pushing down, 4 horizontal |

|
| Several sacrificial zinc anodes
Reduce corrosion due to dis-similar metals in salt water |

| Spring loaded hydraulic resivour
Spring end open to sea pressure |

|
| Annotated picture |
| Information
|
|
Well folks, the presenters are taking down the signs and folding the tables and chairs - Time to take the hint, leave the party, and wait in traffic ;-))
Enhanced Aug 3, 2012