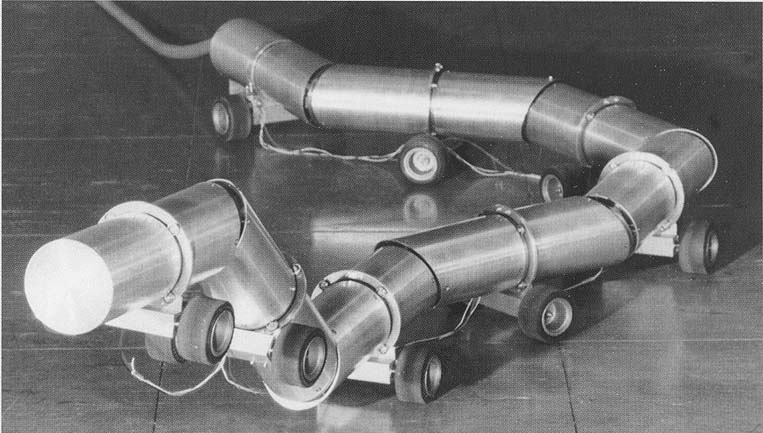
 Oblex, a snake-like rover, is currently on display in the new robot exhibit
Oblex, a snake-like rover, is currently on display in the new robot exhibit
by CHRIS GARCIA
Oblex, a snake-like rover, is currently on display in the new robot exhibit
The final pieces of The Computer Museum collection arrived in California in 1999. Along with most of the earliest PCs (a result of our "Earliest PC Contest" in the 1980s), parts of the UNIVAC 1, rare punch card equipment from the 1920s, and 200 other artifacts rejoined the main collection. Some of the more interesting of these artifacts are machines from the "Robot Theatre," a Boston exhibit highlighting some of the world's earliest and most influential robots.
Recently, many of these robots were put on display in the Museum's Visible Storage Exhibit Area. The massive Mars Rover Hardware Prototype (Jet Propulsion Labs, 1977) dominates the 15-robot display. Designed to explore and map the rugged Martian terrain, the Rover used caterpillar tracks on flexible legs, which allowed the Rover to remain level as it moved over the uneven surface. The first Mars Rover project was abandoned in 1978 when manned space flight became NASA's priority. Shakey (Stanford Research Institute, 1970) also features prominently in the display. The first mobile robot to use artificial intelligence to control its actions, Shakey employed sensing devices such as a laser rangefinder, bump sensors, and a TV camera, and transmitted data to DEC PDP-10 and PDP-15 computers. The computers radioed back commands, allowing Shakey to plan its directions. The process was slow-it could take up to 30 minutes for Shakey to move one meter.
The collection also includes several important robot arms. The ORM (Victor Scheinman and Larry Leifer, 1965) was the first attempt at a computercontrolled arm. The ORM, whose name means "snake" in Norwegian, features seven metal disks sandwiching 28 inflatable air sacks. The method used to create movement-inflating different combinations of sacks-proved to be the arm's undoing, as it was not easy to repeat movements accurately. The Stanford Arm (Victor Scheinman, 1969) was the first successful electrically powered, computer-controlled robot arm. Built to help develop industrial assembly techniques for commercial robots, the Stanford Arm design eventually led to the Vicarm, a robot arm used in research.
The display also features commercial robots used for household and entertainment purposes. The mobile Hubot (Hubotics Corporation, 1981) was designed for home use and was advertised as "the first home robot that's a personal companion, educator, entertainer and sentry ...and he can talk!" The ads for Hubot also pointed out that he could function as a personal computer, with 128k memory, disk drive, and keyboard. The Hero Jr. (Heath/Zenith, 1980) was also designed for home use, and came as a kit. The Hero Jr. could roam hallways, play games, and even act as an alarm clock. The OMNIBOT 2000 (Tomy Kyogo Company, 1985) was a complex robot toy that could be programmed to move, talk and carry objects. The first US ads for OMNIBOT pictured it as a butler serving drinks and making jokes with partygoers.
Due to space limitations, not all of our robots are currently on display. Some of the machines that are not yet being shown include Takeo Kanade's Direct Drive Arm (1981), the Mars Rover Software (testbed) Prototype (1977), and Hans Moravec's Stanford Cart (1965). ::
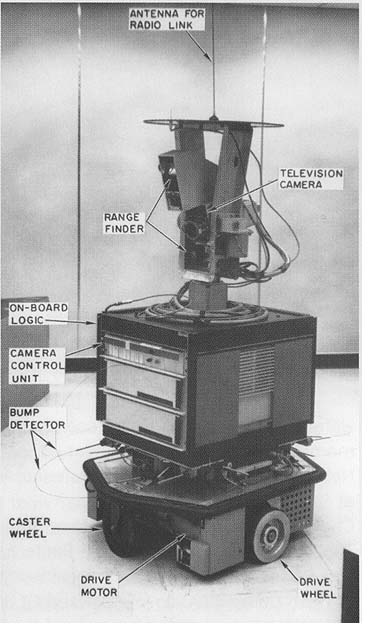 SRI's Shakey, with labels on the various instruments used to allow Shakey
to manuever
SRI's Shakey, with labels on the various instruments used to allow Shakey
to manuever
 The Denning Mobile Robot, used to guard hallways in areas such as prisons
and warehouses, was equipped with
sonar and microwave beacons to guide it along
The Denning Mobile Robot, used to guard hallways in areas such as prisons
and warehouses, was equipped with
sonar and microwave beacons to guide it along
Chris Garcia is Historical Collections Coordinator at The Computer Museum History Center